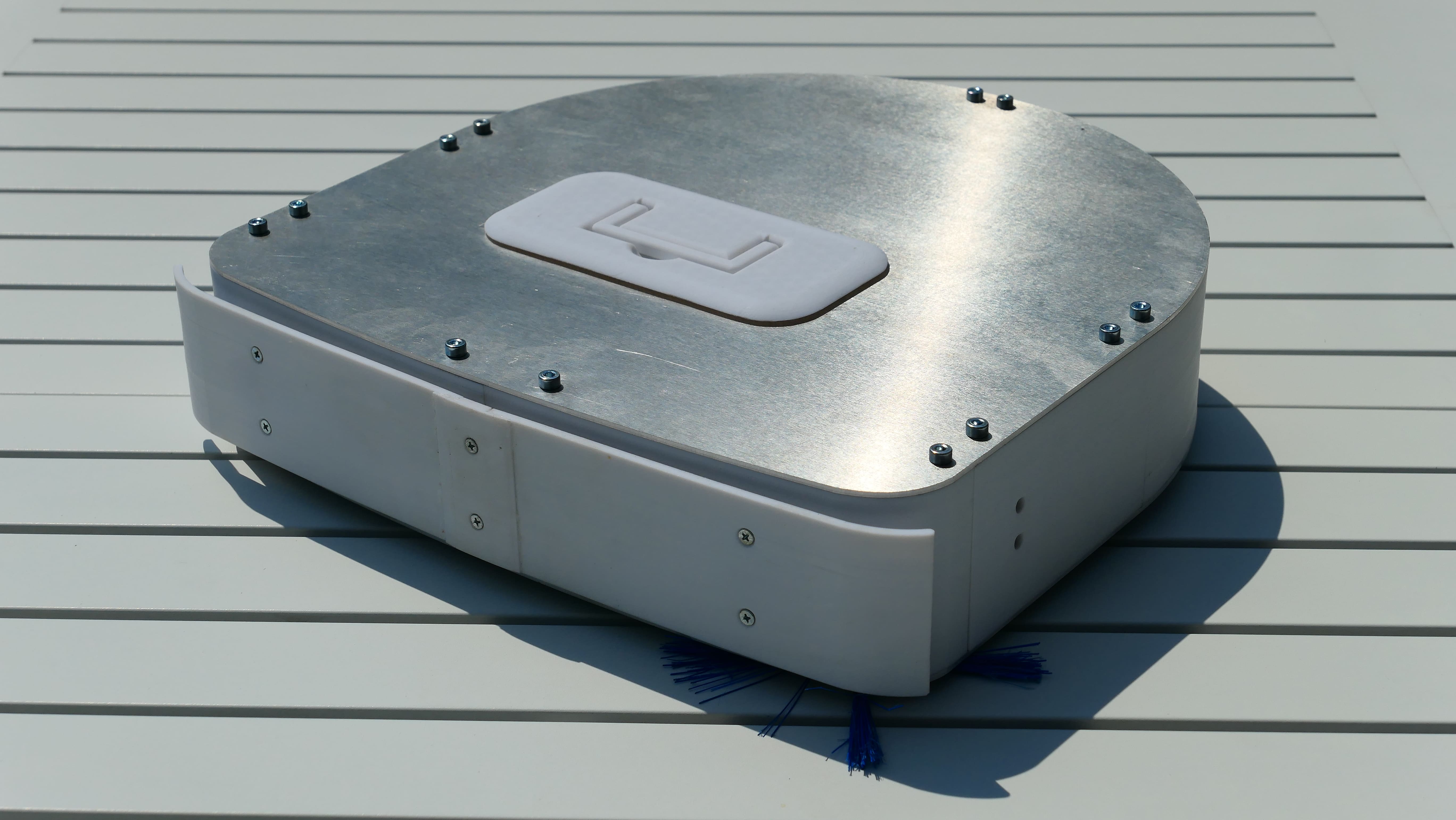
Robot Aspirapolvere DIY
Questo progetto è nato come tesina per la maturità, ora lo sto riprendendo per mano. Questo robot è stampato in 3D e ha qualche pezzo in alluminio tagliato al laser. Viene comandato da una scheda di controllo realizzata su misura e oltre ai sensori di collisione vanta anche la possibilità di aggiungere sensori di prossimità laterali e un unità inerziale per il calcolo della posizione. Implementa una spazzola laterale e una principale con una ventola di aspirazione della polvere.
Filippo Castellan
Mi chiamo Filippo (in arte Floppy Lab), sono uno studente di Ingegneria elettronica con la passione per il Fai Da Te. Principalmente mi piace costruire piccoli sistemi IoT e progetti inerenti alla Robotica. In più sono appassionato del mondo del RC, come aerei, droni e auto radiocomandate. Da un annetto sto gestendo anche un canale YouTube dove carico periodicamente dei video che illustrano alcuni dei miei progetti. Collaboro anche con altri gruppi di makers della mia zona aiutandoli con la mia competenza nella realizzazione di sistemi embedded e non.